基於模組化架構之四軸飛行器設計及其於影像辨識之應用
Technique:
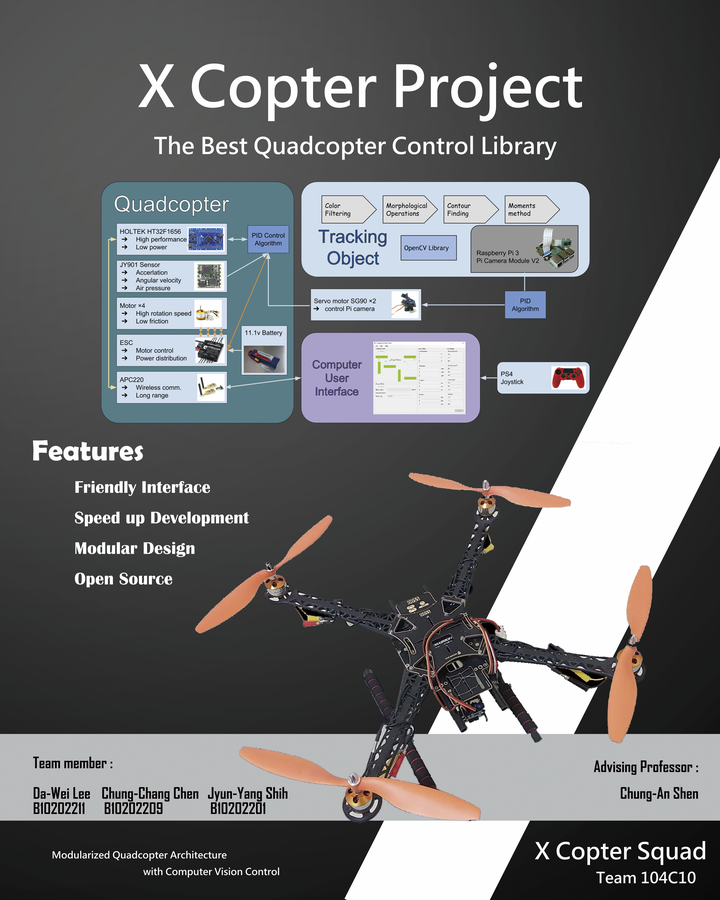
- PID (proportional-integral-derivative) Control
- Object detection (using OpenCV)
- GUI Control Panel
Development Environment:
- Flying Algorithm (using one of the development board):
- ARM - STM32F4
- HOLTEK - HT32F1656
- Intel Edison
- Computer Vision:
- Raspberry Pi 3
- Webcam
- SG90 (x2)
- Sensors/Module:
- Attitude Sensor: GY80 / JY901
- Power suupply and Motor control: ESC
- Wireless communication: APC220
- Other
- 11.1v Battery
- Motor + Propeller (x4)
- PS4 Joystick
Awards:
- School:
- Best Independent Study Award
- Best Popularity Award
- ARM Design Contest:
- Top 10
- HOLTEK MCU Design Contest
- Honorable Award